In RoboCup MSL, teams of five fully autonomous robots play a football match of 2x 15 minutes with a regular size FIFA football as in a human football match. The human referee's instructions are relayed to the players via WiFi. The basic rules are FIFA's human football rules, with a few minor adjustments.
Teams can design their own robots; It is mandatory to have all sensors on the robot and there are size and weight limitations. The teams' research focus is on mechatronics design, control and collaboration between multiple agents at the plan and perception levels.
The robots play strategically using their sensors and share their position and other data with each other. The driving and shooting capabilities of the robots make the RoboCup MSL competitions attractive to spectators from an entertainment and technology perspective.
More information:
MSL website
LOC: Jurge van Eijck ✉
The RoboCup Standard Platform League is a soccer league where all teams participate using the same robot, the NAO robot from United Robotics Group. This means that with the smartest software wins. These robots play fully autonomously and each one takes decisions separately from the others, but they still have to play as a team by using communications.
The teams play on a green field with white lines and goal posts, with no other landmarks, and the ball consists in a realistic white and black soccer one. These game characteristics generate a very challenging scenario, which allows improving the league every year.
More information:
SPL website
LOC: Arnoud Visser ✉

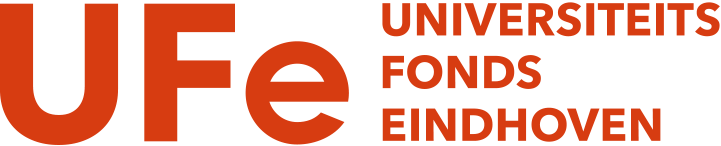
RoboCup Small Size League robot soccer focuses on the problem of intelligent multi-agent cooperation and control in a highly dynamic environment with a hybrid centralized/distributed system.
A game takes place between two teams of eleven (six in division B) robots each. The robot must fit within an 18cm diameter circle and must be no higher than 15cm. The robots play soccer with an orange golf ball on a green carpeted field that is about 12m long by 9m wide. Cameras above the field track the robots and the ball. Each team has a computer next to the field, on which they receive camera data and referee commands. Typically, these computers also perform most of the processing required for coordination and control of the robots. Communication to the robots is wireless.
Building a successful team requires clever design, implementation and integration of many hardware and software sub-components into a robustly functioning whole making Small Size robot soccer a very interesting and challenging domain for research and education.
More information:
SSL website
LOC: Emiel Steerneman ✉
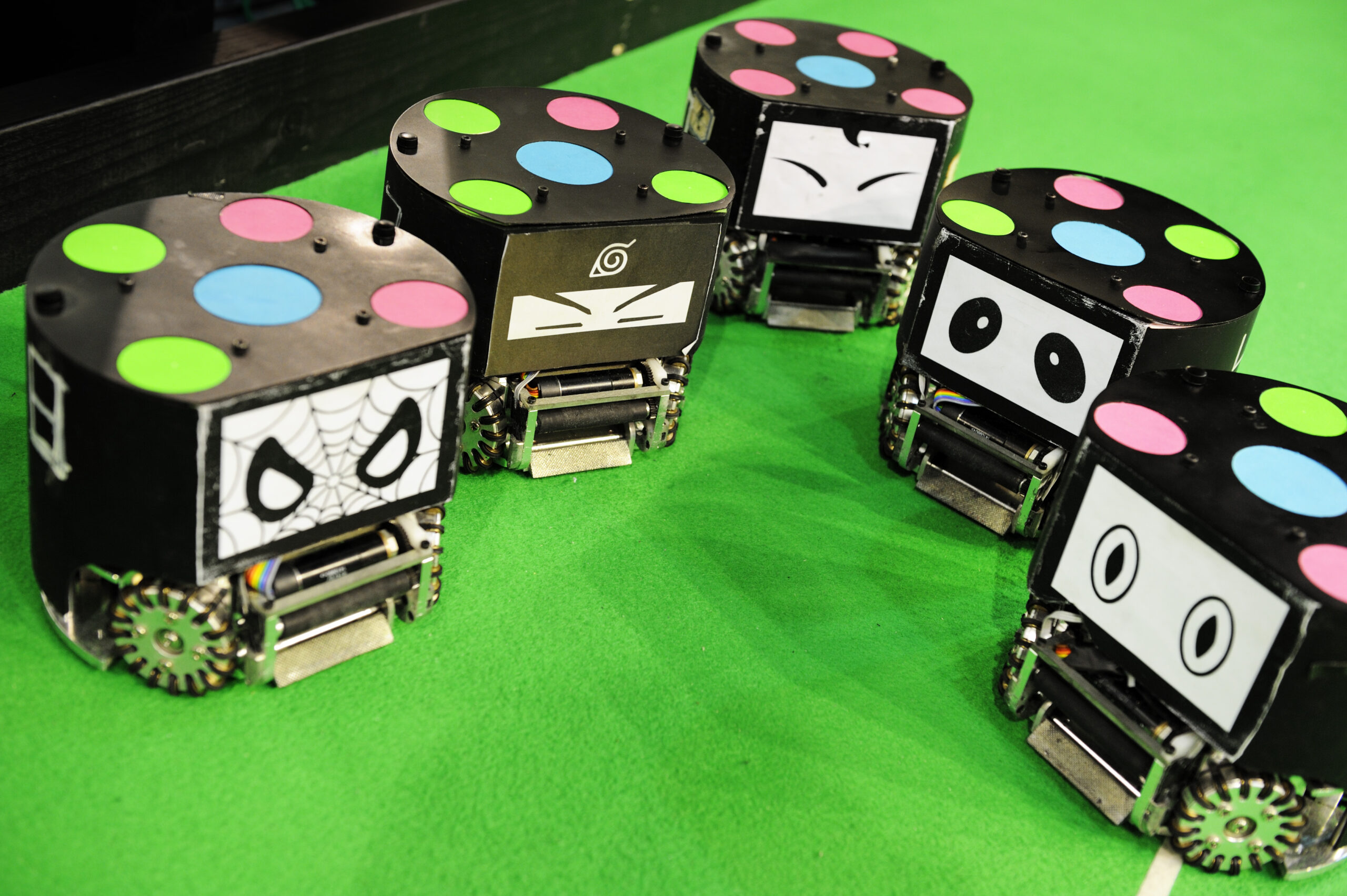
In the Humanoid League (HL), autonomous robots with a human-like body and human-like senses play soccer against each other.
The Humanoid League promotes research for making scientific progresses in hardware, perception, decision-making and execution processes of autonomous robots that can interact with human in a socially acceptable way. In particular, robots in HL are custom designed and assembled by teams, they have human-proportionate body (two legs, two arms, and one head, which are attached to a trunk) and all actions of the robots must be kinematically equivalent to humanoid motions. Sensors used in HL have an equivalent to human senses, in similar position: mono or stereo camera in the robot's head; touch sensors, force sensors, and temperature sensors; gyro, accelerometer; wireless communication between teams and a referee system; microphone, speakers, whistle recognition.
Teams play according to FIFA game rules, including throw in the ball from side line, goalie diving, kicking the ball from different angles and penalty behaviours. The development of such robotic behaviours will create more accepted and trustworthy robots that can have effective human-robot interactions, and as a consequence, better and more long-term human-robot collaboration and cooperation.
More information:
Humanoid website
LOC: John Rooijakkers ✉
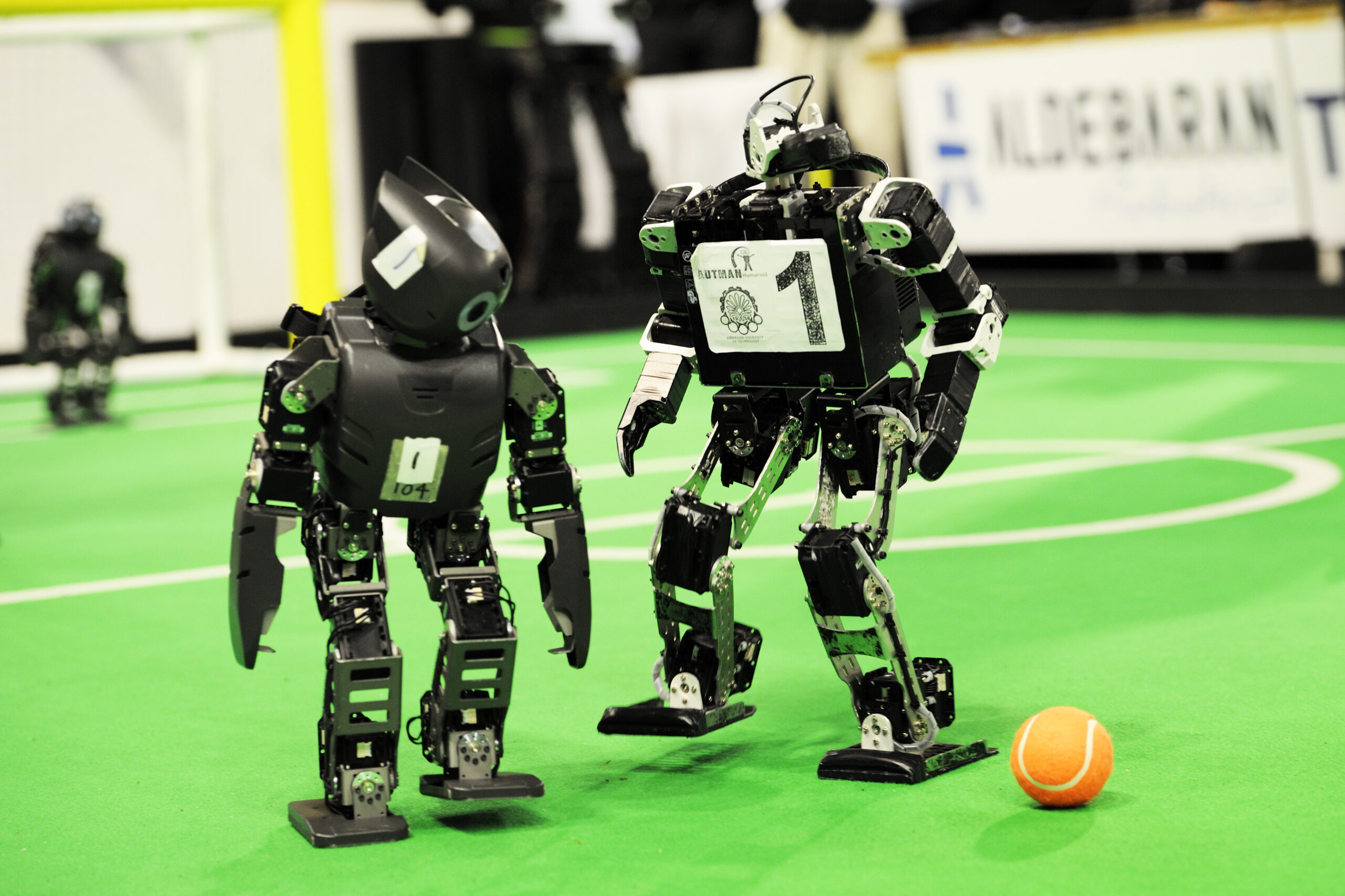
More information:
Simulation website
LOC: Koen de Koning ✉